
Description
The Ethernet Switch is a 5-port 10/100 Ethernet switch designed to integrate perfectly with the Fathom-X Tether Interface Board, providing three additional Ethernet ports for accessories on the BlueROV2. This switch was designed in collaboration with BotBlox and leverages their extensive expertise on Ethernet switches for robotics applications!
Why do I need an Ethernet switch?
Ethernet networks form a high-speed connection between computers and they are a backbone of the internet! We also use an Ethernet network on the BlueROV2 that connects the surface computer to the ROV’s onboard computer, providing a high-speed connection that carries telemetry data and video. There’s a lot of extra bandwidth available on that network that can be leveraged for other devices, like sonars, IP cameras, and sensors.
Ethernet allows multiple devices to be connected to the same network, however you can’t simply connect all the cables together, you need an Ethernet switch to route data between connections. This Ethernet switch does exactly that! With 5 ports, two are used to connect to the existing Fathom-X and Raspberry Pi computer in the ROV, leaving three additional ports for expansion!
Just imagine what you can do with three more ports! You could add a multibeam imaging sonar, add an additional computer for dedicated computer vision processing, or connect a high-end IP camera for new video options! The possibilities are endless!
Ethernet Switch Usage Diagram on ROV
How does it integrate?
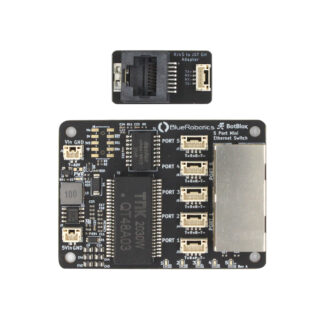
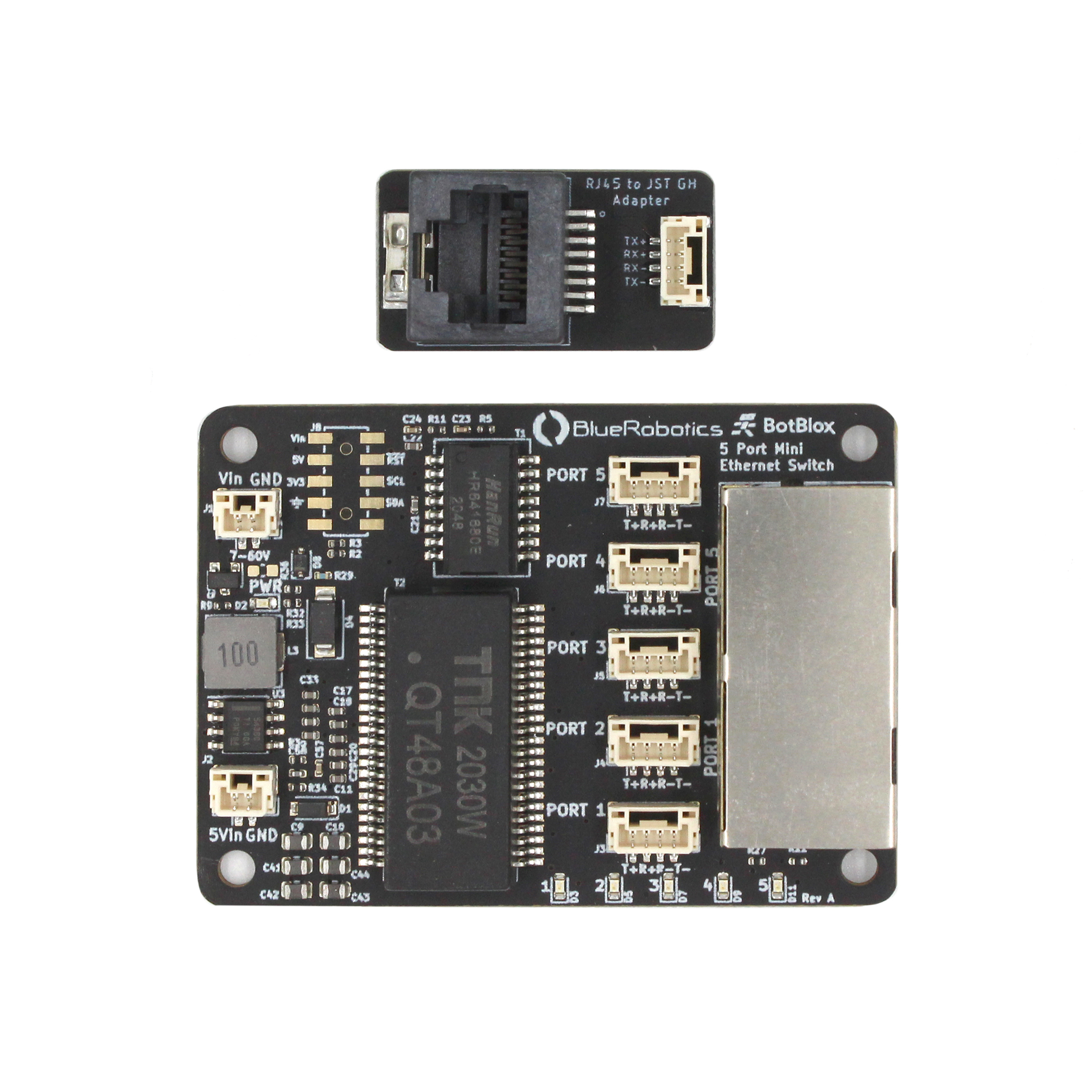
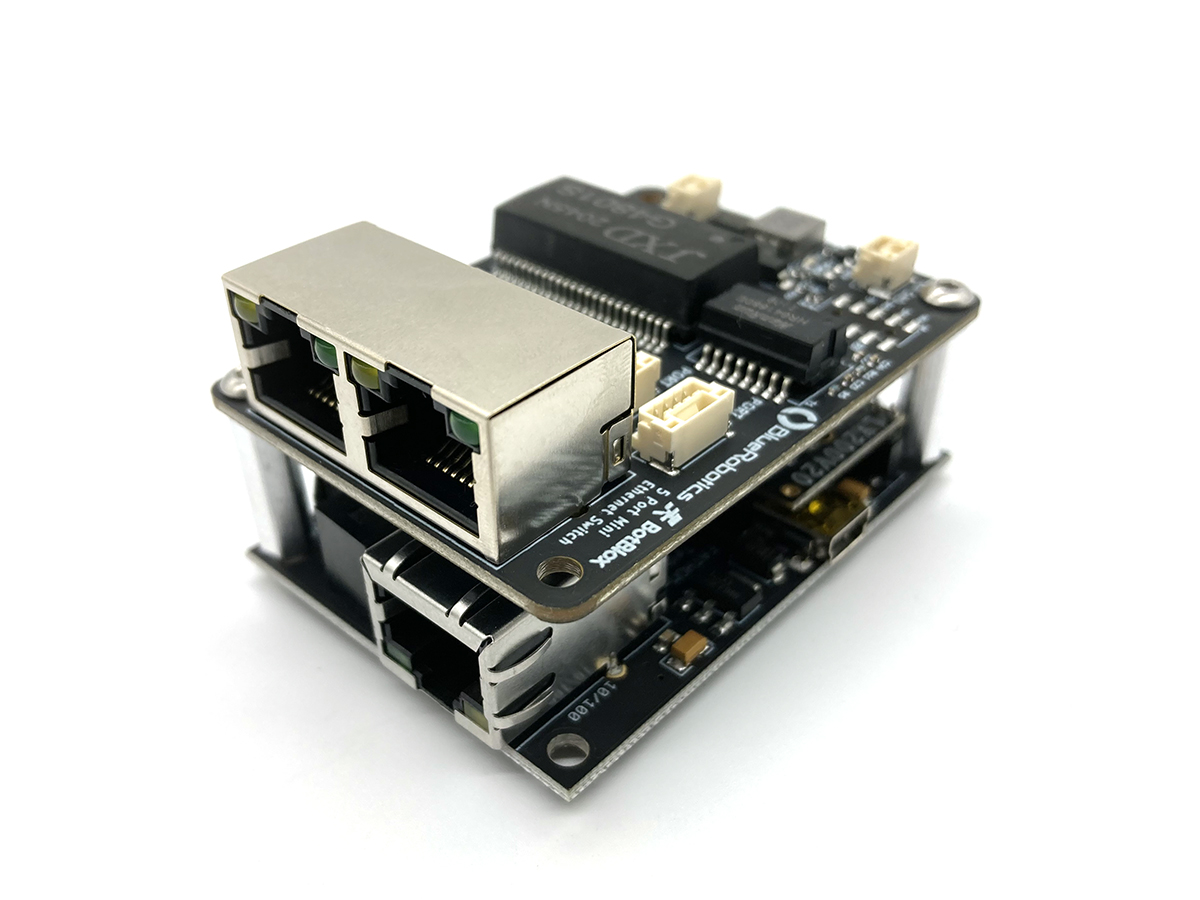
The Ethernet Switch is designed to be a perfect complement for the Fathom-X board. It has the same dimensions and mounting holes so that it can stack on top. Two RJ45 port connections are available to quickly connect the Fathom-X and Raspberry Pi through the switch, while the remaining connections are broken out to JST-GH connectors that follow the Blue Robotics Connector Standard. The board can be powered from a wide voltage input up to 60V and has low power consumption. Indicator lights show activity on each port.
The switch comes with an RJ45 to JST-GH adapter board to make it easy to connect your Ethernet device during testing, but we recommend solder splicing one of the included JST-GH cables to your device for long term integration on an ROV since a standard RJ45 connector does not fit through a cable penetrator hole.
The Ethernet Switch is cool, but what you integrate with it is the really cool part! Please feel free to share your integration on the Blue Robotics discussion forum where it might help others to find new ways to use their ROV.
Contents
1 x Ethernet Switch Board
1 x RJ45 to JST-GH Adapter Board
3 x 200mm JST-GH to JST-GH twisted pair cable
1 x 150mm Ethernet cable
1 x Power cable with spade connectors
2 x 18mm mounting standoffs
4 x M3x5 mounting screws